Reactive Wall Following Robot
Development of a reactive wall-following robot capable of navigating autonomously in a question-mark-shaped environment.
Overview
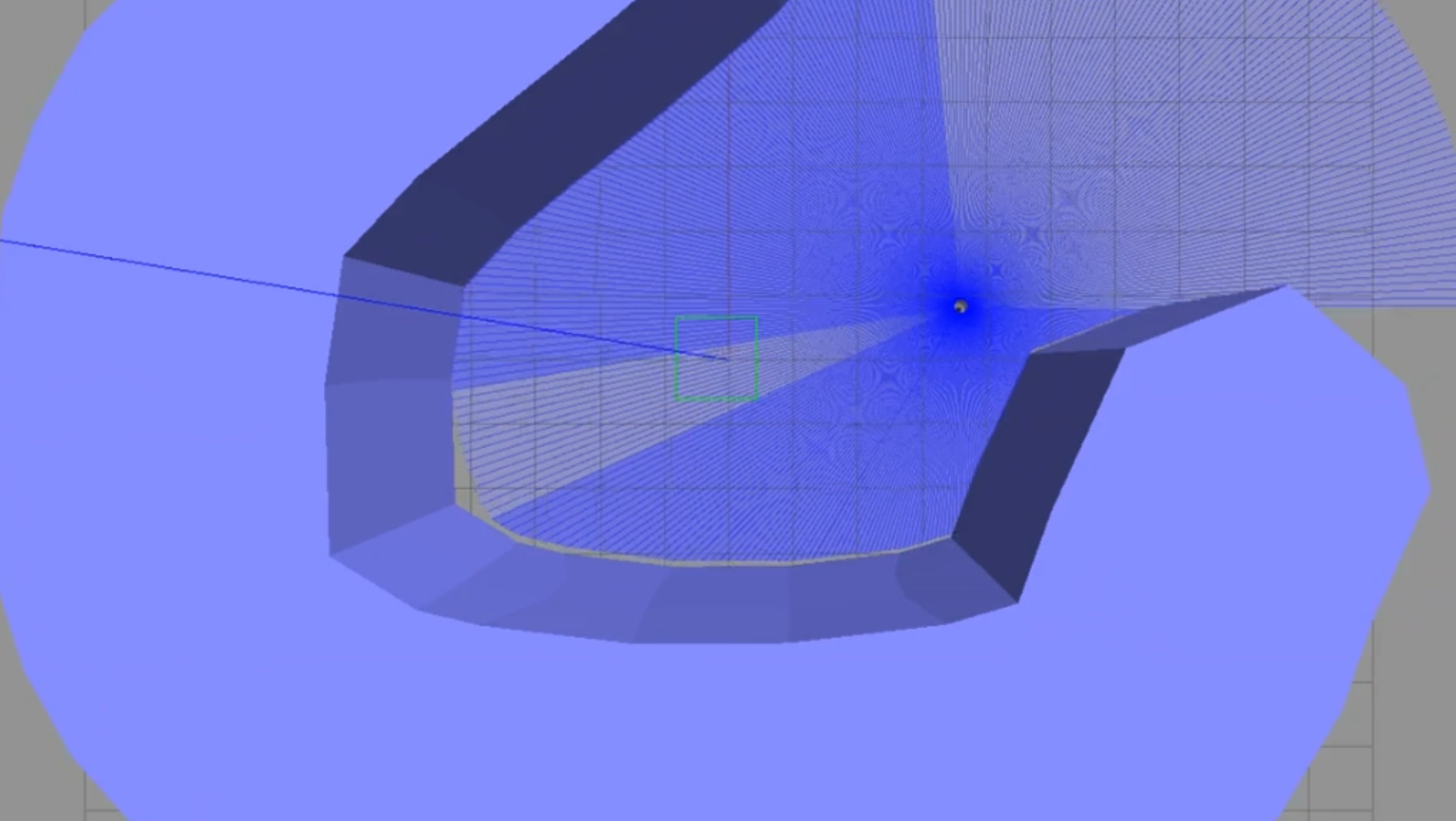
This project aimed to develop a reactive wall-following robot capable of navigating autonomously in a question-mark-shaped environment. The robot was equipped with LIDAR sensors to detect obstacles and used a reactive control strategy to follow the wall.
Features
- Reactive Wall Following: The robot navigates autonomously in a question-mark-shaped environment.
- LIDAR Sensors: The robot is equipped with LIDAR sensors to detect obstacles.
- Reactive Control Strategy: The robot uses a reactive control strategy to follow the wall.
Technologies
- Programming Languages: Python
- Libraries: ROS
- Tools: Gazebo
Demonstration
Reactive Wall Following Robot Demonstration
Links
Acknowledgements
This project was developed in collaboration with Filipe Campos and Francisco Rente.